John Reuvers from Methore in Kerkdriel and Johan van Namen from the Netherlands took the initiative …
John Reuvers from Methore in Kerkdriel and Johan van Namen from the Netherlands took the initiative in 2004 to carry out research into the problems surrounding harvesting mushrooms mechanically. The result is the development of a picking vision robot.
Methore conducts innovative mechatronics projects, mechanisation using vision and robots.
The company is familiar with previous attempts to pick mushrooms using robots, which ultimately stranded in good intentions, but the company believes that by taking an entirely new approach the result will be a feasible picking robot that works.
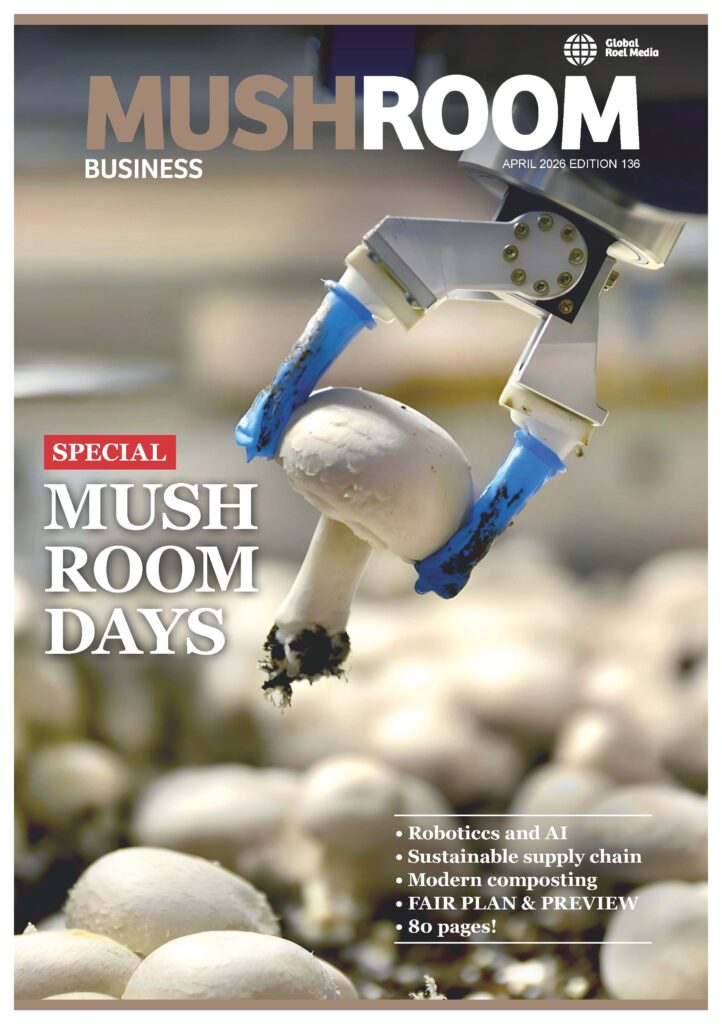
The bottleneck in developing a picking robot was often being able to grasp the mushrooms without damaging them and recognising mushrooms in clusters. Methore analysed the hand movements used by pickers and studied the various forces exerted between the fingers and the directional movement. Various movements were then trialled in a series of conceptual experiments.
Finally a prototype gripper was developed, able to pick a mushroom from a cluster and grasp it. This principle has been tested and patented. This principle can be applied to a range of similar objects.
For mushroom recognition, camera and laser techniques were applied. According to John Reuvers various filter algorithms were tested. The huge variables in the growth patterns of mushrooms make recognition complicated. The concept uses a combination of various algorithms, which recognise individual mushrooms as well as mushrooms in clusters. These vision algorithms work closely with the functionality of the gripper.
Although little mechanical knowledge has been applied, according to Reuvers the concept proves that it can already pick mushrooms automatically in conventional beds, without damage.
The ultimate aim is to have a machine that operates fully independently. The picking rate is expected to be 1 mushroom/3 sec/gripper. A maximum of 3 grippers could be installed on the robot. The grippers and robot are controlled by motion controllers, controlled in turn by a PLC and a vision computer.
The machine still requires further mechanical details, and industrial production. In cooperation with a precision engineering company/machinery constructor the mechanical stability and performance of the machine can be improved.
Talks are currently being held with the Product Board Horticulture and LTO Grow Service to secure the successful continuation of the project. See http://cvr.methore.nlfor photographs and a film of the new machine.